
Principal Investigator of Planned Research

Research Outline
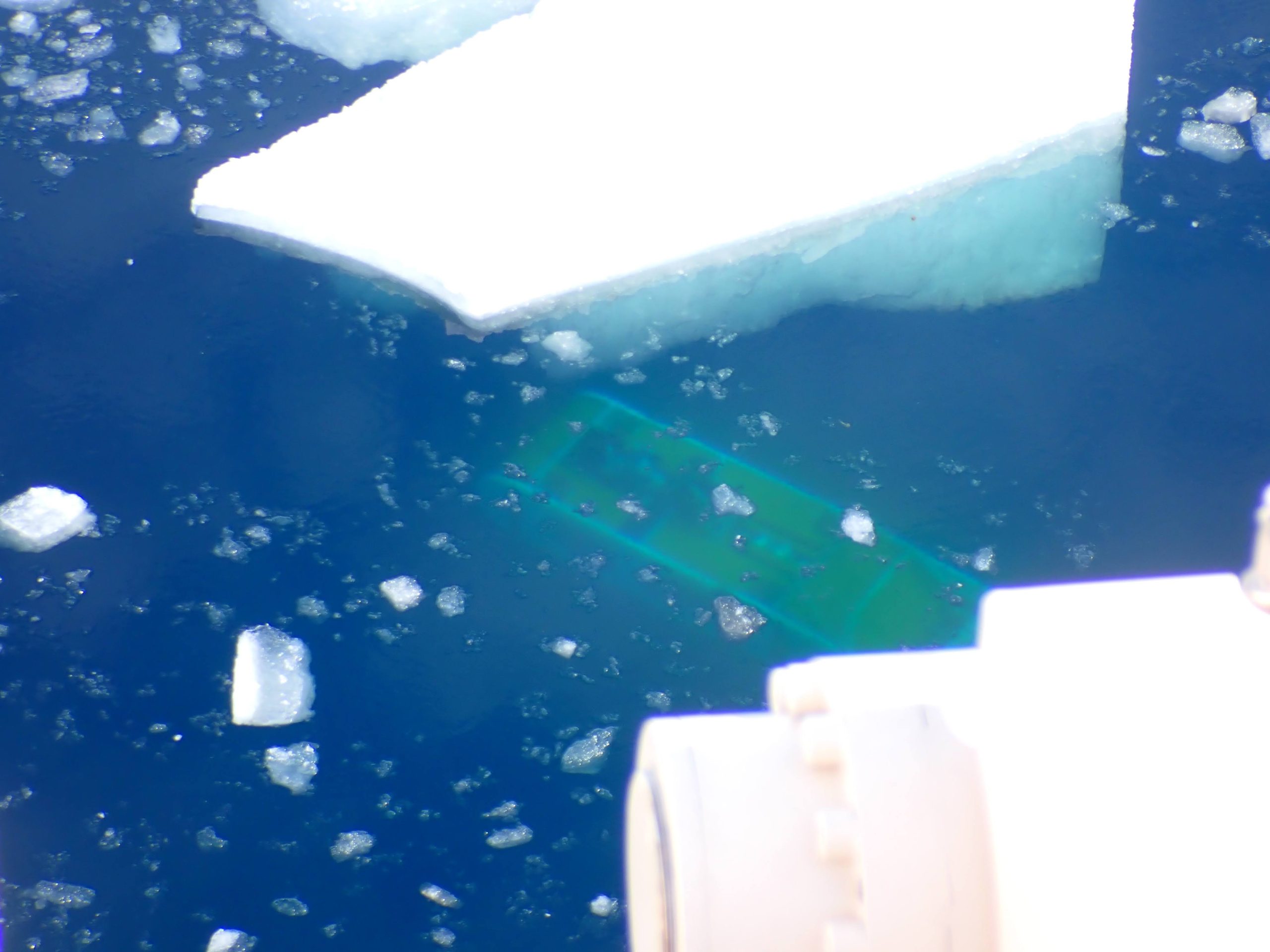
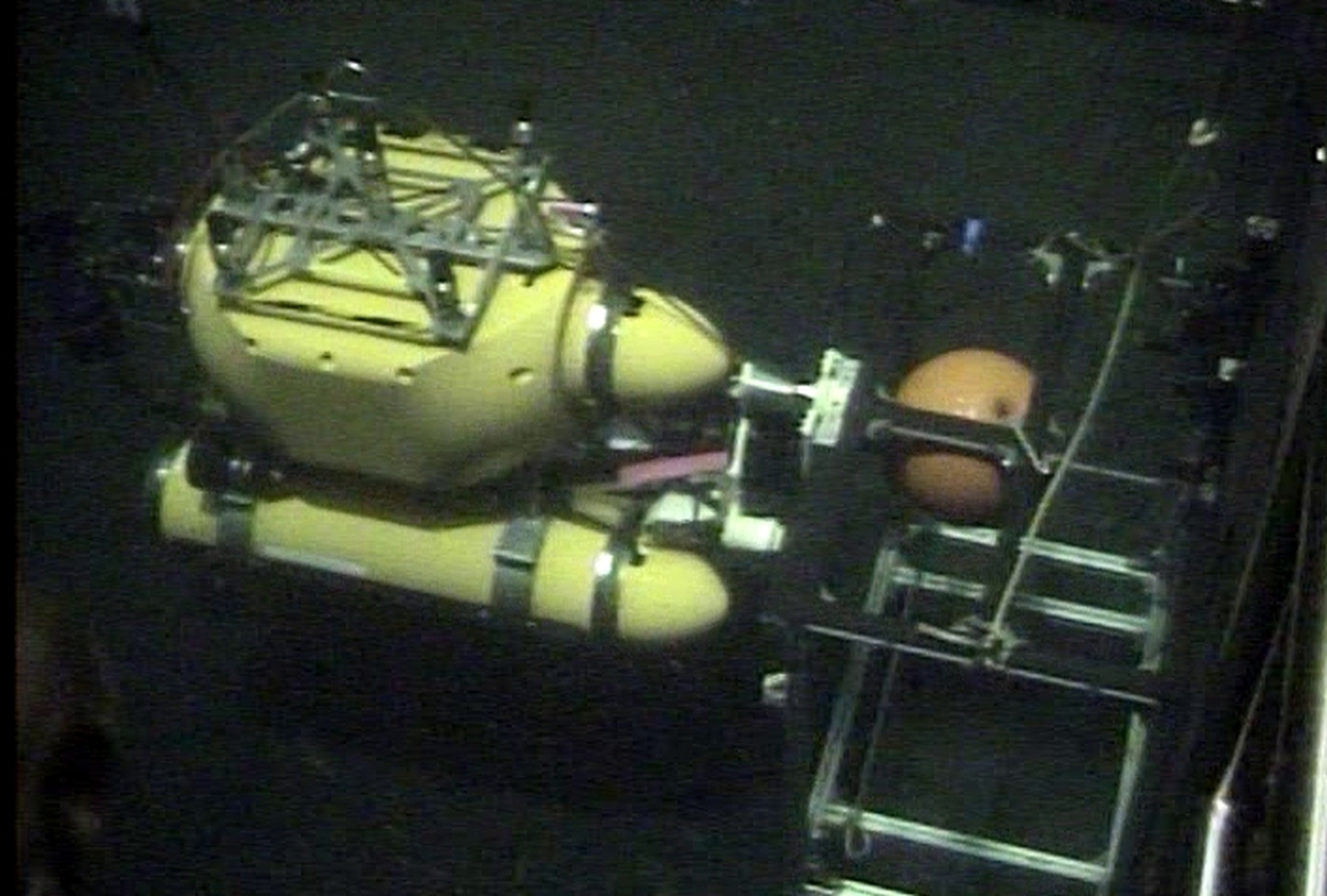
Due to the difficulty in accessing under Antarctic ice shelves, there is little data available on the ocean, seabed and ice shelf floor, hindering the understanding of ice sheet fluctuation mechanisms. The key to overcoming this situation is an autonomous underwater vehicle (AUV) that can explore large areas without cables. In this project, the AUV MONACA, our testbed vehicle for under-ice exploration, will be improved for further deployed under Antarctic ice shelves and sea ice to perform breakthrough observation of the three-dimensional structure of water temperature and salinity, the shape of the ice bottom surface and bathymetry, which will contribute to understanding the ice sheet and climate change mechanisms in Antarctica. In addition, new methods will be developed for longer-term and wider-area observations, such as an underwater docking station and low-frequency electromagnetic hub. Furthermore, an in-situ particle monitoring camera that integrates Raman spectroscopy and image analysis will be miniaturized and improved for use on AUVs to enable in-situ measurements of organic matter under ice. The project aims to contribute to the establishment of new scientific knowledge in cooperation with the various groups in the field, and to achieve engineering breakthroughs.
Keywords
Autonomous underwater vehicle, Underwater exploration, Low-frequency electromagnetic waves, Raman spectroscopy
Members
-
 MATSUDA TakumiSchool of Science and Technology, Meiji University
MATSUDA TakumiSchool of Science and Technology, Meiji University -
 YOSHIDA HiroshiJapan Agency for Marine-Earth Science and Technology
YOSHIDA HiroshiJapan Agency for Marine-Earth Science and Technology -
 TAKAHASHI TomokoJapan Agency for Marine-Earth Science and Technology
TAKAHASHI TomokoJapan Agency for Marine-Earth Science and Technology -
 OKINO KyokoAtmosphere and Ocean Research Institute, The University of Tokyo
OKINO KyokoAtmosphere and Ocean Research Institute, The University of Tokyo -

-
 TAMURA TakeshiNational Institute of Polar Research
TAMURA TakeshiNational Institute of Polar Research -
 YAMAGATA HirokazuNippon Institute of Technology
YAMAGATA HirokazuNippon Institute of Technology